Enumerating Raspberry Pis
After installing a freshly-copied microSD card in a headless Raspberry Pi, there is sometimes an awkward moment. The Raspberry Pi boots in its default configuration and obtains an address from DHCP, then you need to SSH into it. However, even if in general the Raspberry Pi can be found with its domain name (raspberrypi by default) using a local DNS server or mDNS, it can also become a pain sometimes, for instance when you configure multiple Raspberry Pis at the same time.
In situations where ssh pi@raspberrypi.local does not work, you need to scan the local network to find the Raspberry Pis, which can be achieved with nmap. Raspberry Pi devices can be recognized because their MAC addresses are issued by the organization "Raspberry Pi Trading".
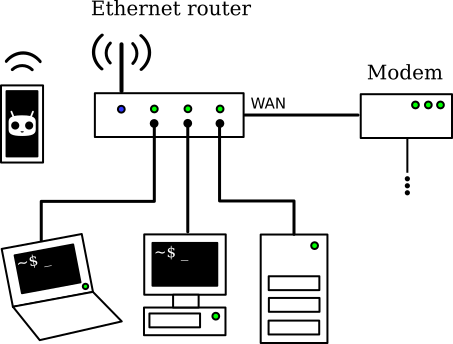
This allows to automate the discovery process by enumerating interfaces with ip then enumerating the Raspberry Pis on each interface with nmap:
#!/bin/bash
echo "Looking for Raspberry Pis..."
IFACES=$(ip -4 -o addr show | awk '/docker0/ {found=1; next} /scope global/ {print $4}')
RPI_ADDRS=()
for IFACE in $IFACES; do
echo "Scanning on interface $IFACE..."
ADDRS=$(sudo nmap -n -sP "$IFACE" | grep …